Chapter 51 — Modeling and Control of Underwater Robots
Neptus command and control infrastructure
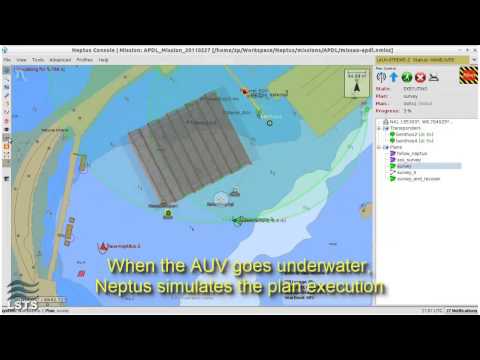
See how Neptus is used to plan, simulate, monitor and review missions performed by autonomous vehicles. Neptus, originally developed at the Underwater Systems and Technology Laboratory, is open source software available from http://github.com/LSTS/neptus
/ NOPTILUS project [NOPTILUS is funded by European Community's Seventh Framework Programme ICT-FP]
Laboratario de Sistemas e Tecnologias Subaquaticas - Porto University
324