Chapter 51 — Modeling and Control of Underwater Robots
Adaptive L1 depth control of a ROV
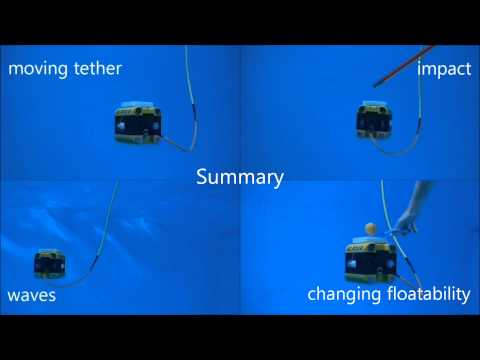
This video illustrates the ability of the L1 adaptive controller to deal with parameter changes (buoyancy) and to reject disturbances (impacts, tether movements, etc.). This controller is implemented on a modified version of the AC-ROV underwater vehicle to perform depth regulation. This work was conducted at LIRMM (University Montpellier 2 / CNRS) in collaboration with Tecnalia France.
Divine Maalouf, Vincent Creuze, Ahmed Chemori
267
LIRMM - University Montpellier 2 / CNRS
Latitude =43° 38'.22 North , Longitude = 3° 50'.42 East (link to Google Maps)