Chapter 46 — Simultaneous Localization and Mapping
SLAM++: Simultaneous localization and mapping at the level of objects
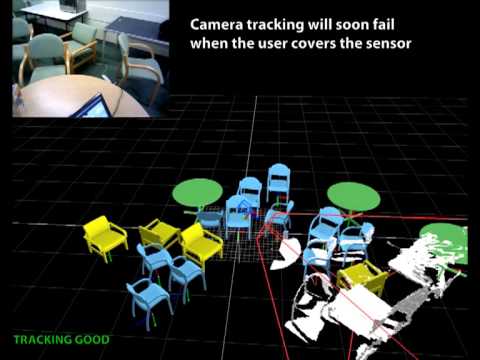
This video describes SLAM++, an object-based, 3-D SLAM system.
Reference. R.F. Salas-Moreno, R.A. Newcombe, H. Strasdat, P.H.J. Kelly, A.J. Davison: SLAM++: Simultaneous localisation and mapping at the level of objects, Proc. IEEE Int. Conf. Computer Vision Pattern Recognition, Portland (2013).
Andrew Davison
454
Latitude =42.360091 , Longitude = -71.09416 (link to Google Maps)