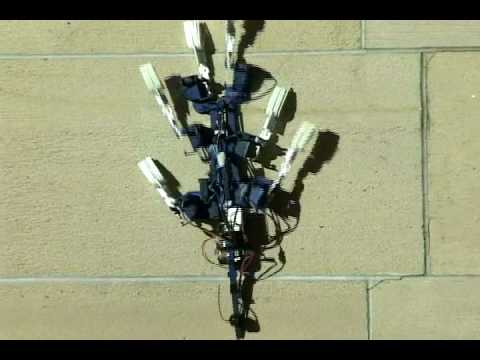
SpinybotII: Climbing hard walls with compliant microspines
This climbing robot can scale flat, hard vertical surfaces including those made of concrete, brick, stucco and masonry without using suction or adhesives. It employs arrays of miniature spines that catch opportunistically on surface asperities. The approach is inspired by the mechanisms observed in some climbing insects and spiders.
Sangbae Kim, Alan T. Asbeck, Mark R. Cutkosky, William R. Provancher
388