Chapter 47 — Motion Planning and Obstacle Avoidance
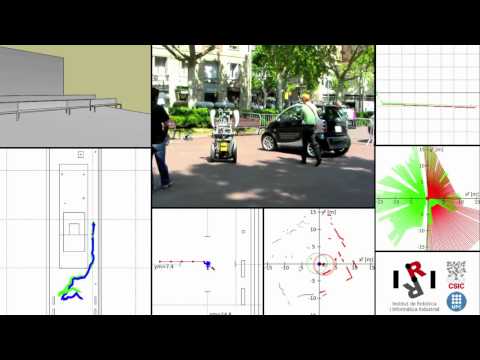
Mobile-robot, autonomous navigation in Gracia district, Barcelona
This video demonstrates a fully autonomous navigation solution for mobile robots operating in urban pedestrian areas. Path planning is performed by a graph search on a discretized grid of the workspace.
Obstacle avoidance is performed by a slightly modified version of the dynamic-window approach.