Chapter 47 — Motion Planning and Obstacle Avoidance
Mobile-robot navigation system in outdoor pedestrian environment
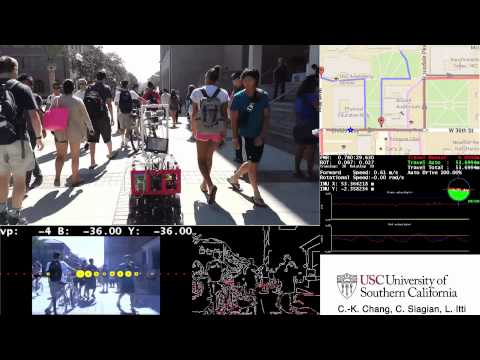
We present a mobile-robot navigation system guided by a novel vision-based, road-recognition approach. The system represents the road as a set of lines extrapolated from the detected image contour segments. These lines enable the robot to maintain its heading by centering the vanishing point in its field of view, and to correct the long-term drift from its original lateral position. We integrate odometry and our visual, road-recognition system into a grid-based local map which estimates the robot pose as well as its surroundings to generate a movement path. Our road recognition system is able to estimate the road center on a standard dataset with 25 076 images to within 11.42 cm (with respect to roads that are at least 3 m wide). It outperforms three other state-of-the-art systems. In addition, we extensively test our navigation system in four busy campus environments using a wheeled robot. Our tests cover more than 5 km of autonomous driving on a busy college campus without failure. This demonstrates the robustness of the proposed approach to handle challenges including occlusion by pedestrians, non-standard complex road markings and shapes, shadows, and miscellaneous obstacle objects.