Chapter 47 — Motion Planning and Obstacle Avoidance
Autonomous robotic smart-wheelchair navigation in an urban environment
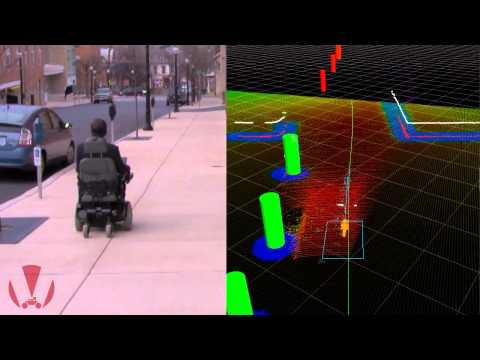
This video demonstrates the reliable navigation of a smart wheelchair system (SWS) in an urban environment. Urban environments present unique challenges for service robots. They require localization accuracy at the sidewalk level, but compromise estimated GPS positions through significant multipath effects. However, they are also rich in landmarks that can be leveraged by feature-based localization approaches. To this end, the SWS employed a map-based approach. A map of South Bethlehem was acquired using a server vehicle, synthesized a priori, and made accessible to the SWS client. The map embedded not only the locations of landmarks, but also semantic data delineating seven different landmark classes to facilitate robust data association. Landmark segmentation and tracking by the SWS was then accomplished using both 2-D and 3-D LIDAR systems. The resulting localization algorithm has demonstrated decimeter-level positioning accuracy in a global coordinate frame. The localization package was integrated into a ROS framework with a sample-based planner and control loop running at 5 Hz. For validation, the SWS repeatedly navigated autonomously between Lehigh University's Packard Laboratory and the University bookstore, a distance of approximately 1.0 km roundtrip.