Chapter 32 — 3-D Vision for Navigation and Grasping
LIBVISO: Visual odometry for intelligent vehicles
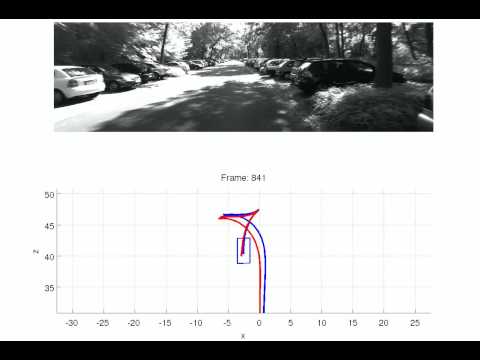
This video demonstrates a visual-odometry algorithm on the performance of the vehicle Annieway (VW Passat). Visual odometry is the estimation of a video camera's 3-D motion and orientation, which is purely based on stereo vision in this case. The blue trajectory is the motion estimated by visual odometry, and the red trajectory is the ground truth by a high-precision OXTS RT3000 GPS+IMU system. The software is available from http://www.cvlibs.net/